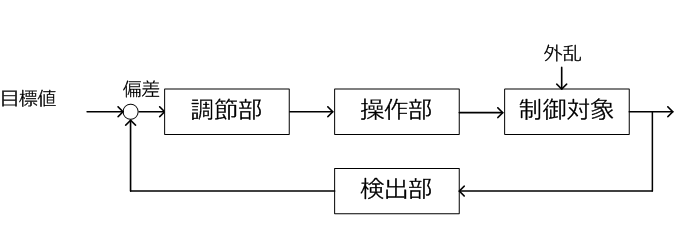
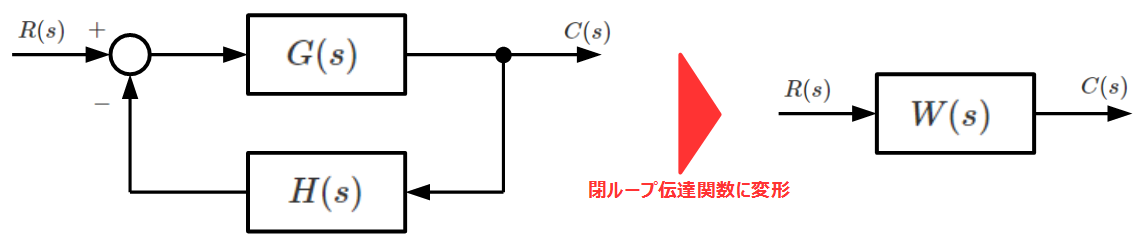
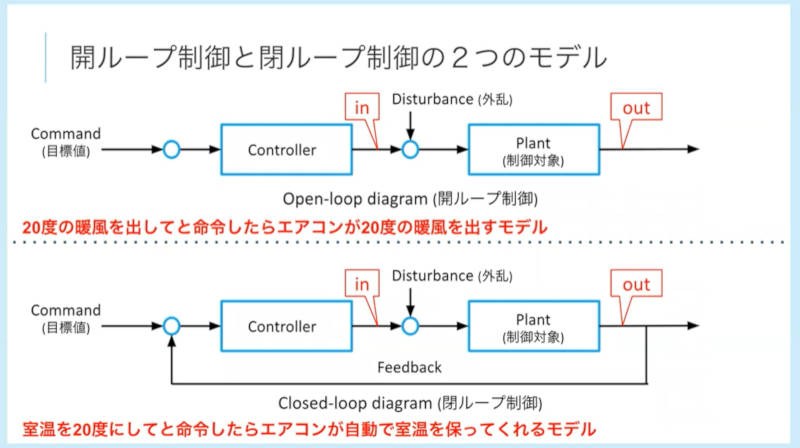
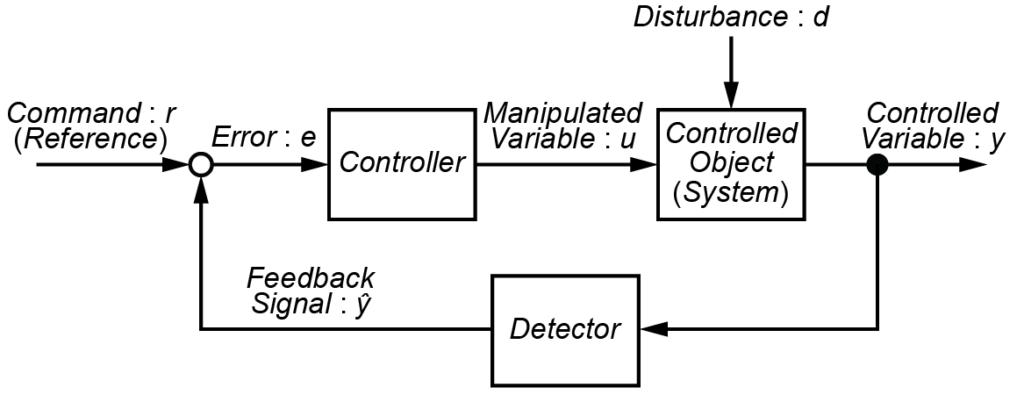
閉ループ制御(へいループせいぎょ)またはクローズループ制御(英: Close-loop control)はフィードバックによって制御量の値と目標値とを比較し、それらを一致させるように訂正動作を行う制御である。フィードバック制御ともいう。
反対に、開ループ制御はフィードバックを持たないため、外乱や想定と現実のズレによる誤差が残る。
脚注
関連項目
- 開ループ制御
- フィードバック

閉ループ制御(へいループせいぎょ)またはクローズループ制御(英: Close-loop control)はフィードバックによって制御量の値と目標値とを比較し、それらを一致させるように訂正動作を行う制御である。フィードバック制御ともいう。
反対に、開ループ制御はフィードバックを持たないため、外乱や想定と現実のズレによる誤差が残る。